理工学院钱辉环教授团队获IROS最佳应用论文提名
摘要
近日,机器人与智能系统领域最著名、影响力最大的顶级学术会议—— IEEE智能机器人与系统国际会议(IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS)正式召开。
香港中文大学(深圳)理工学院钱辉环教授团队两篇论文被本届IROS接收,其中关于自主帆船的研究还被提名为最佳应用论文。
会议简介
IEEE智能机器人与系统国际会议(IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS) 是机器人与智能系统领域最著名、影响力最大的顶级学术会议。
作为国际机器人与自动化领域的两大影响最大的学术会议之一,自机器人技术发展初期的 1988 年开始,IROS 每年举办一届。每年,来自世界各个顶尖机器人研究机构的专家和业界人士汇聚在这个盛会,探讨和展示机器人行业最前沿的技术。受疫情影响,本该在拉斯维加斯举行的 IROS 2020 改在线上举办,并且史无前例的通过线上免费向公众开放。
研究介绍
1.OceanVoy: A Hybrid Energy Planning System for Autonomous Sailboat
(OceanVoy: 一种面向自主帆船的混合能源控制系统)
第一作者:理工学院三年级博士研究生孙钦波
通讯作者:钱辉环教授
这篇论文被提名为IROS最佳应用论文
研究背景
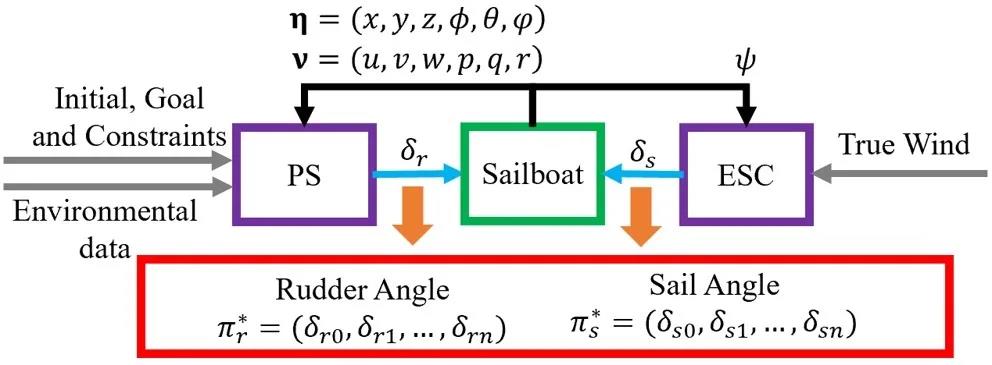
自主帆船是一种依靠风提供动力的水面机器人。面向长航时远距离的航行,其能源规划是极其重要的一个环节,控制对象包括帆和舵。通过有效的能源规划,将进一步增强自主帆船长航程长航时的优势。然而,目前在自主帆船的能源优化方面,相关研究较少。现阶段,机器人能源优化一般可分为三个方面:机械设计优化、微处理器系统优化以及算法优化。其中算法优化主要包括:运动规划和能源调度。本文主要在运动规划层面展开,研究自主帆船的能源优化。
论文简介
在本研究中,我们提出了一种混合控制方法并将其应用于自主帆船 OceanVoy 的能源规划。该混合控制方案包括:伪谱(PS: Pseudo-spectral)最优控制方法用于航向控制,以及极限搜索控制(ESC: Extreme Seeking Control)用于风帆调节。我们通过混合控制方案来得到优化后的路径以及对应的电机控制序列,其中包含了帆船的舵和帆的控制序列。研究通过仿真和实验对上述方案进行了验证,结果表明在该方案下的帆船的运动规划和能量规划是有效的。通过对不同场景的能源情况统计,该方案可节省约7%的能源。

作者简介

孙钦波
理工学院三年级博士生研究生
本文第一作者为香港中文大学(深圳)理工学院三年级博士生孙钦波,其主要研究方向为机器人能源规划以及自主帆船机器人系统,其导师为钱辉环教授。
2.A Two-stage Automatic Latching System for The USVs Charging in Disturbed Berth
面向无人船在扰动环境下自主充电任务的两阶段对接系统
共同第一作者:理工学院三年级博士研究生薛凯文,理工学院二年级博士研究生刘崇锋
通讯作者:钱辉环教授
研究背景
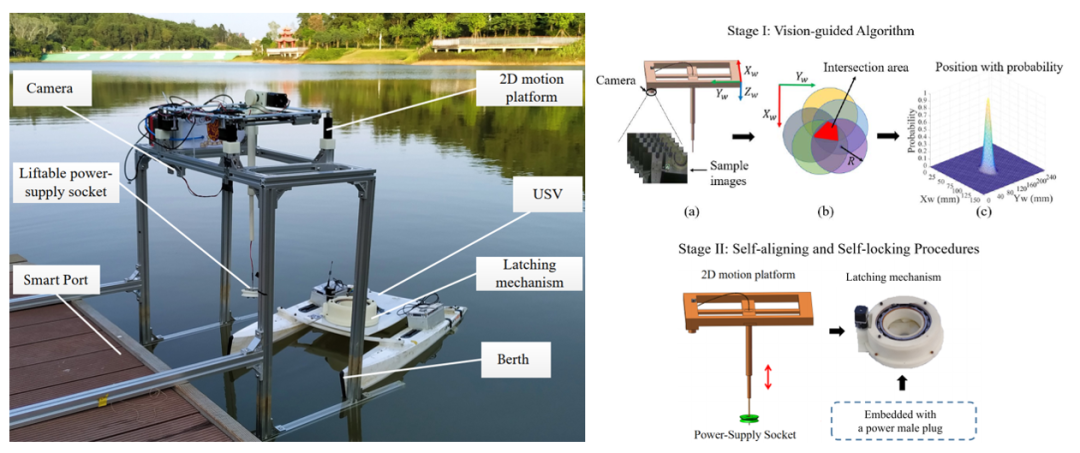
无人船以其优越的机动性能,良好的布放回收,可以高效地进行各种水面任务。无人船的自动驾驶及其相关技术,对于提高船舶领域的智能化水平和促进相关行业的发展,至关重要。但其由于续航时间短,在推广方面造成了阻碍。因此,本研究主要针对无人船长时间作业的续航需求,解决水面扰动带来的困难,研究一套供无人船自主停泊充电的系统,进而提高无人船的智能化水平和相关行业的发展。
论文简介
本文研究船舶自主停泊充电的关键技术,通过在扰动情况下对于船体运动信息的捕捉,估计对接装置的接口位置,求得最优的充电位置。随后通过机械设计,保证充电对接装置连接稳定可靠。通过水面实验,验证了系统的有效性,并大大提高了对接的成功率。
作者简介

薛凯文
理工学院三年级博士生研究生
本文共同第一作者为香港中文大学(深圳)理工学院三年级博士研究生薛凯文,其研究领域为智能机器人、自动驾驶、增强学习、视觉感知,其导师为钱辉环教授。

刘崇锋
理工学院二年级博士生研究生
本文共同第一作者为香港中文大学(深圳)理工学院二年级博士研究生刘崇锋,其研究领域为机器人系统设计、运动控制、无人船,目前从事机艇协同相关研究,其导师为钱辉环教授。
导师简介

钱辉环
理工学院助理教授
AIRS副院长
钱辉环教授2004年在中国科技大学获得工学学士。他于同年加入香港中文大学自动化与计算机辅助工程学学系,担任助理研究员。2010年获得自动化与计算机辅助工程学哲学博士学位。此后在机械与自动化工程学系,历任副研究员、研究助理教授。2015年加入香港中文大学(深圳),兼任机器人与智能制造国地联合工程实验室副主任。
钱教授发表了2部专著、1部编著、90余篇国际期刊以及国际会议论文,并取得6项已获授权的专利。他正主持1项国家自然科学基金重点类项目;主持完成2项香港特区政府资助的项目,并作为核心成员参与完成了10项在香港和内地的项目。由于其在全方位汽车转向界面方面的工作,钱教授和他的科研团队获得IEEE/ASME 机电一体化学报的2011年度最佳论文奖。他的研究方向包括机器人与智能系统。